Detecting Traffic Lights and Signs
Detecting Traffic Lights and Signs

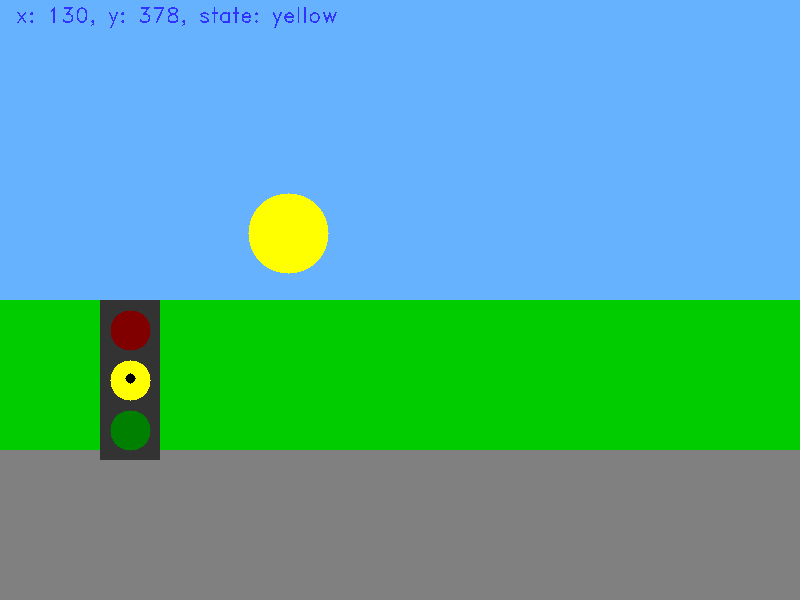
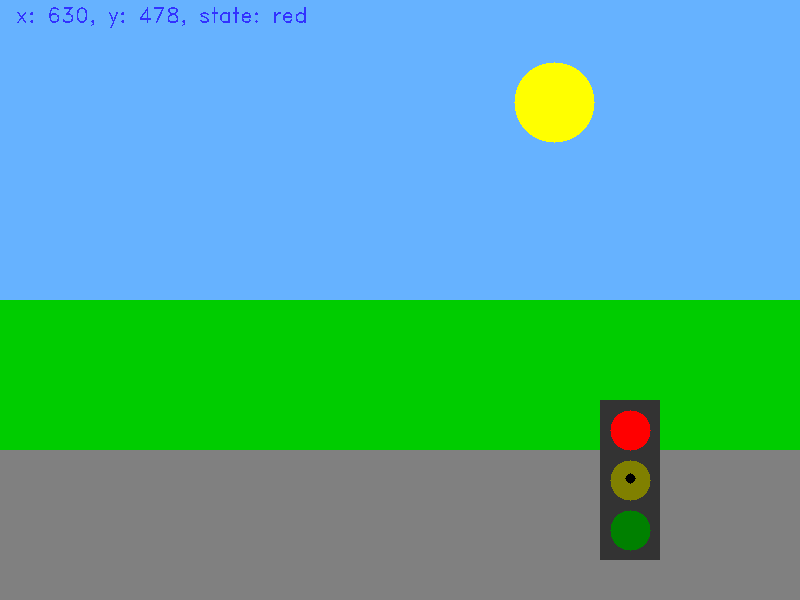
The program found the center of the traffic light, marked it with a black dot, and listed the coordinates & light color.
The program found the center of the traffic light, marked it with a black dot, and listed the coordinates & light color.
The program found the center of the traffic light, marked it with a black dot, and listed the coordinates & light color.
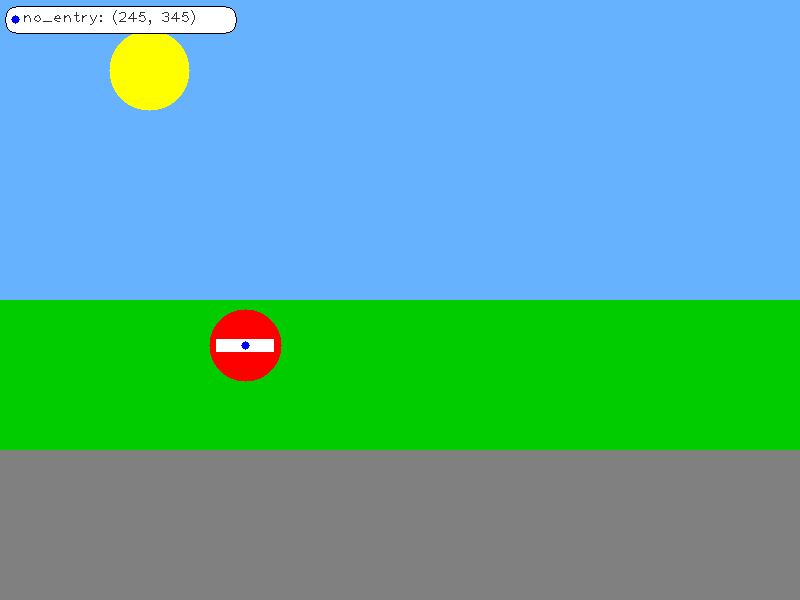
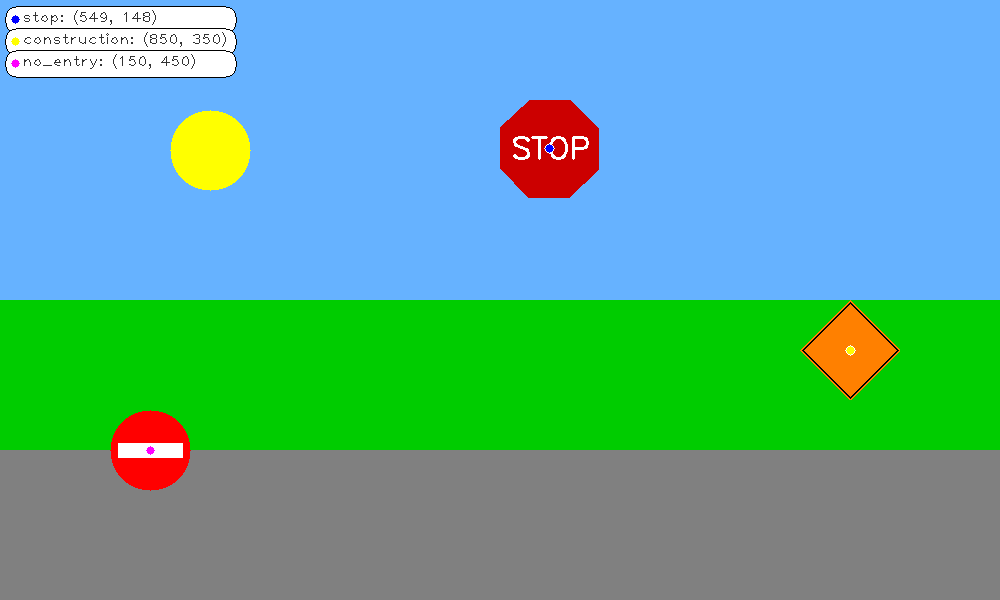
The program found the center of the sign, marked it with a dot, and listed the coordinates in the white textbox.
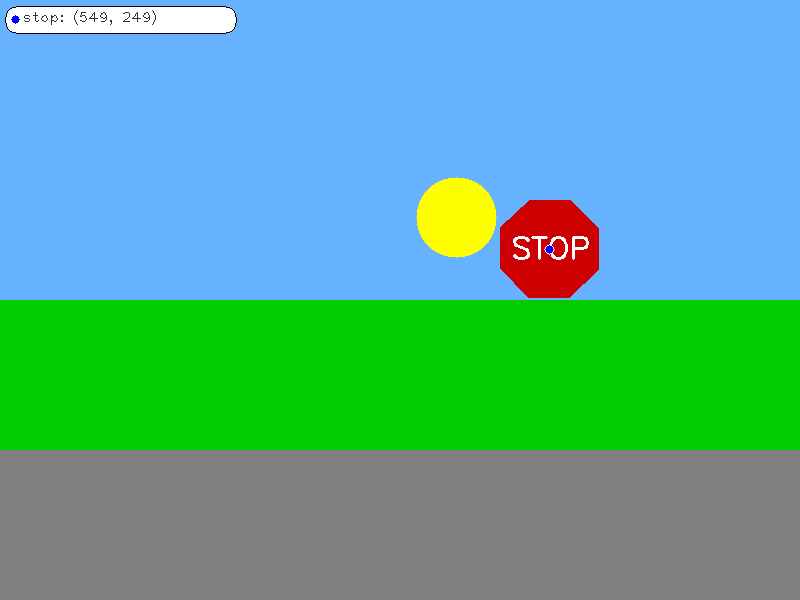
The program found the center of the sign, marked it with a dot, and listed the coordinates in the white textbox.
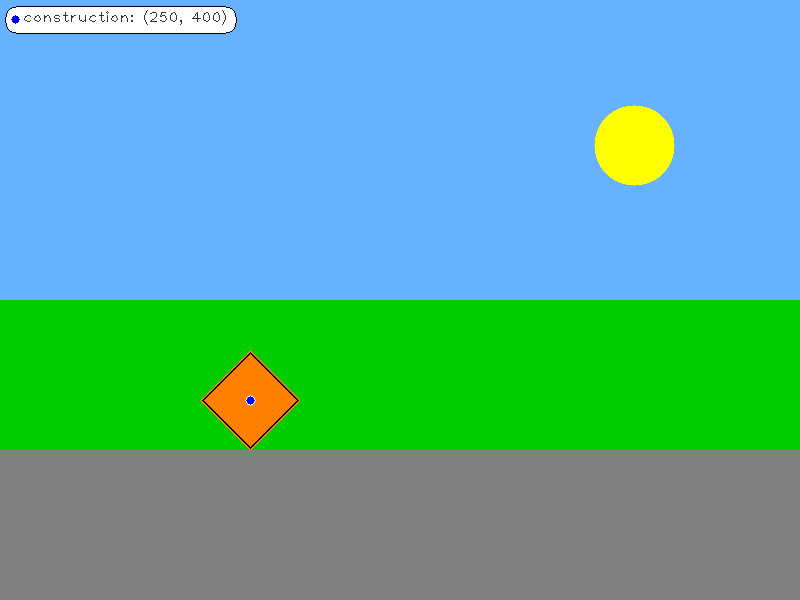
The program found the center of the sign, marked it with a dot, and listed the coordinates in the white textbox.
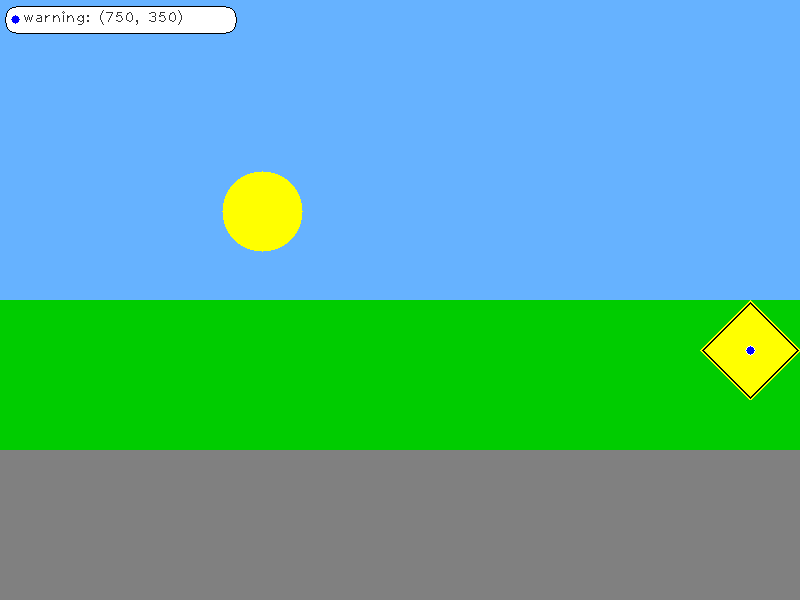
The program found the center of the sign, marked it with a dot, and listed the coordinates in the white textbox.
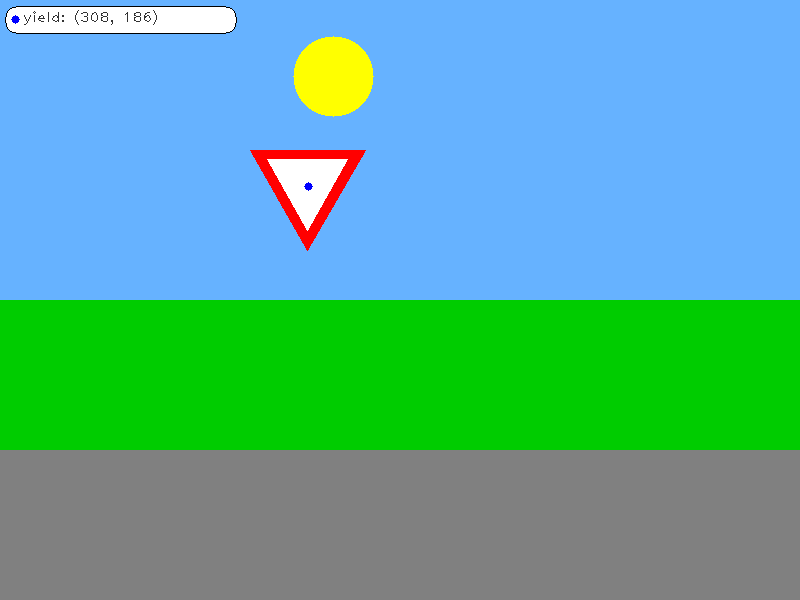
The program found the center of the sign, marked it with a dot, and listed the coordinates in the white textbox.
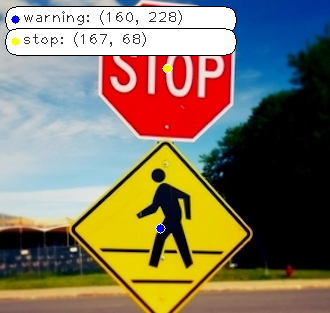
The program found the center of the signs, marked them with dots, and listed the coordinates & sign type in the white textbox.
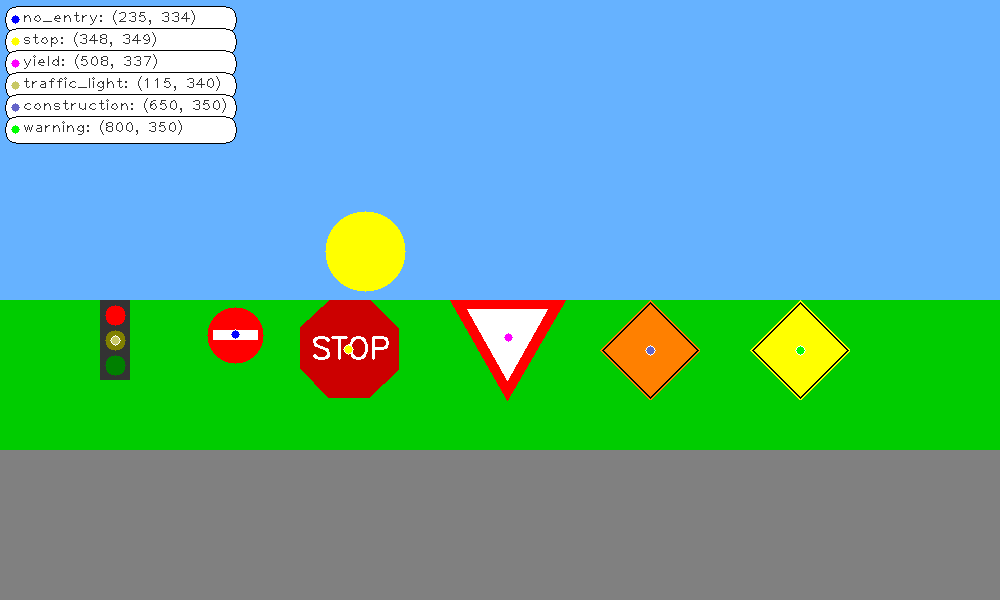
The program found the center of the signs, marked them with dots, and listed the coordinates & sign type in the white textbox.
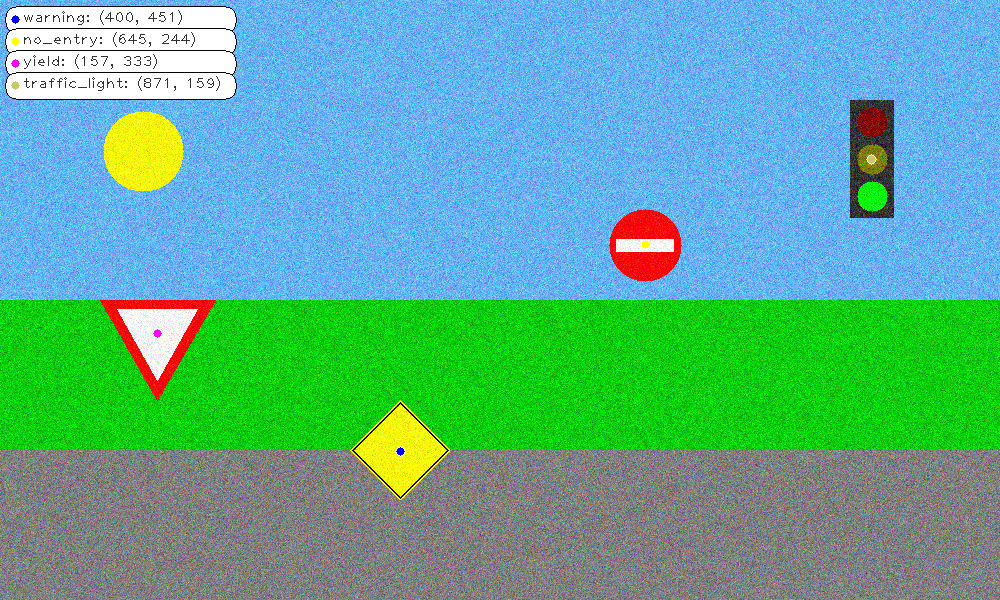
The program found the center of the signs in a noisy scene, marked them with dots, and listed the coordinates & sign type in the white textbox.
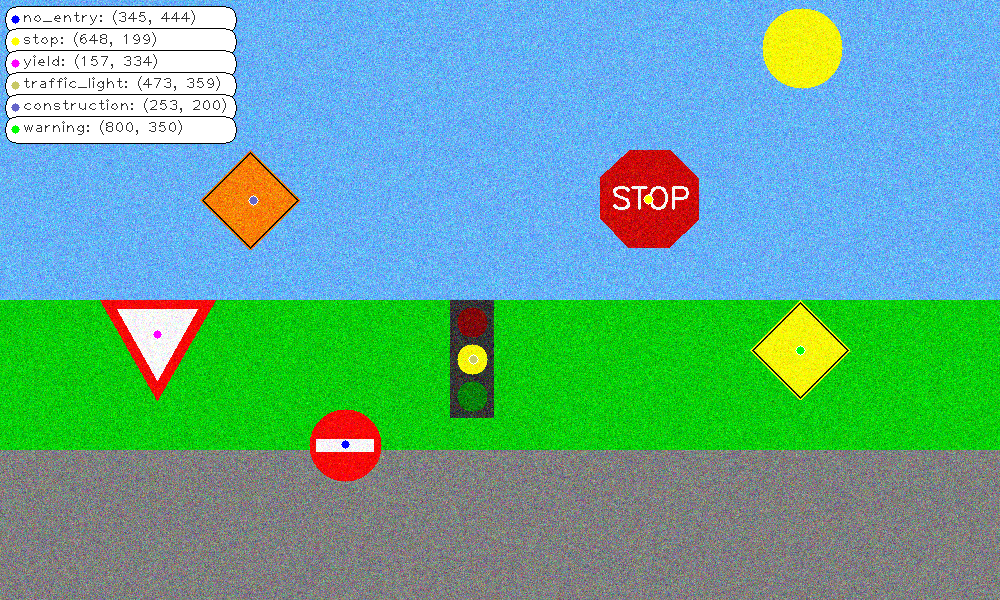
The program found the center of the signs in a noisy scene, marked them with dots, and listed the coordinates & sign type in the white textbox.

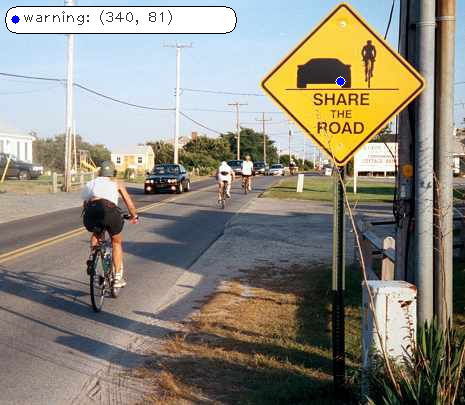
The program found the center of the signs in a real-world photo, marked them with dots, and listed the coordinates & sign type in the white textbox.
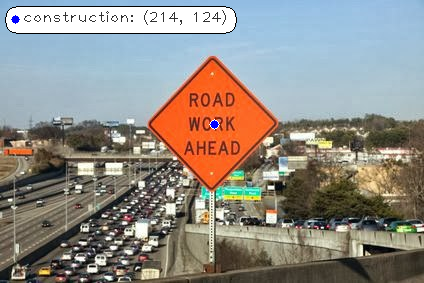
The program found the center of the signs in a real-world photo, marked them with dots, and listed the coordinates & sign type in the white textbox.
The program found the center of the signs in a real-world photo, marked them with dots, and listed the coordinates & sign type in the white textbox.

The program found the center of the signs in a real-world photo, marked them with dots, and listed the coordinates & sign type in the white textbox.

The program found the center of the signs in a real-world photo, marked them with dots, and listed the coordinates & sign type in the white textbox.
The program found the center of the signs in a real-world photo, marked them with dots, and listed the coordinates & sign type in the white textbox.
Object Tracking and Pedestrian Detection
Object Tracking and Pedestrian Detection
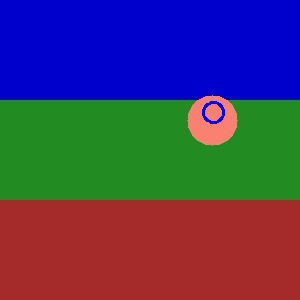
The program used the Kalman filter to track the pink circle, and marked its location with a blue ring.
The program used the Kalman filter to track the pink circle, and marked its location with a blue ring.
The program used the Kalman filter to track the pink circle, and marked its location with a blue ring.
The program used the Kalman filter to track the pink circle, and marked its location with a blue ring.

The program used the Kalman filter to track a pedestrian, and marked his location with a blue ring.

The program used the Kalman filter to track a pedestrian, and marked his location with a blue ring.

The program used the Kalman filter to track a pedestrian, and marked his location with a blue ring.

The program used the Kalman filter to track a pedestrian, and marked his location with a blue ring.
The program used the Particle filter to track the pink circle. Then it drew a pink bounding box around the circle, marked the particle locations with yellow dots and the mean particle location with a white ring.
The program used the Particle filter to track the pink circle. Then it drew a pink bounding box around the circle, marked the particle locations with yellow dots and the mean particle location with a white ring.
The program used the Particle filter to track the pink circle. Then it drew a pink bounding box around the circle, marked the particle locations with yellow dots and the mean particle location with a white ring.
The program used the Particle filter to track the pink circle. Then it drew a pink bounding box around the circle, marked the particle locations with yellow dots and the mean particle location with a white ring.
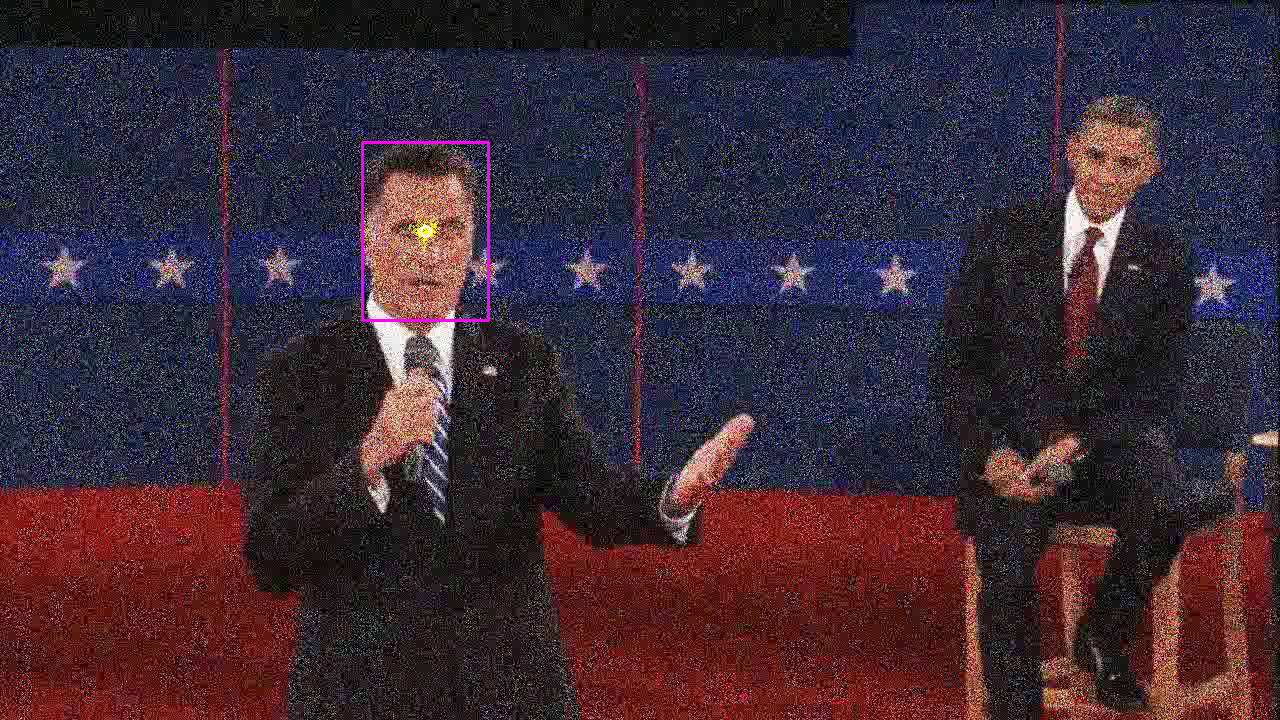
The program used the Particle filter to track the man's head. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the man's head. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.
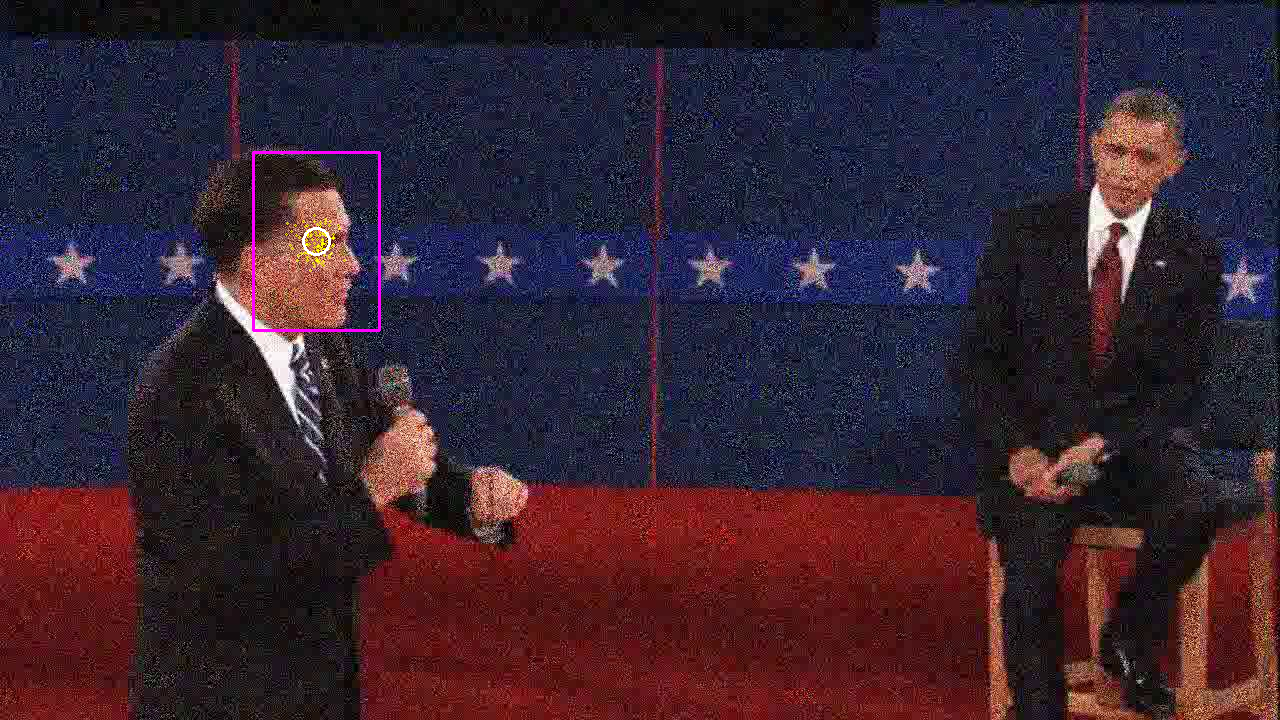
The program used the Particle filter to track the man's head. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.
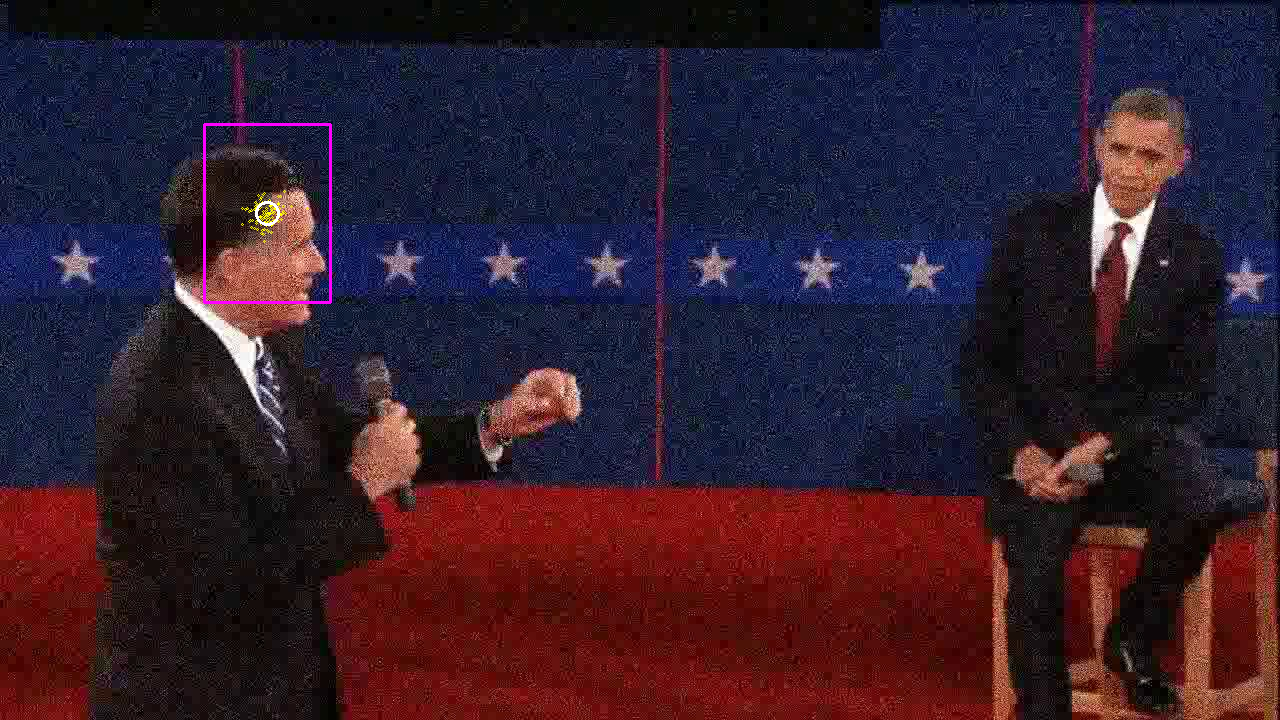
The program used the Particle filter to track the man's head. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.
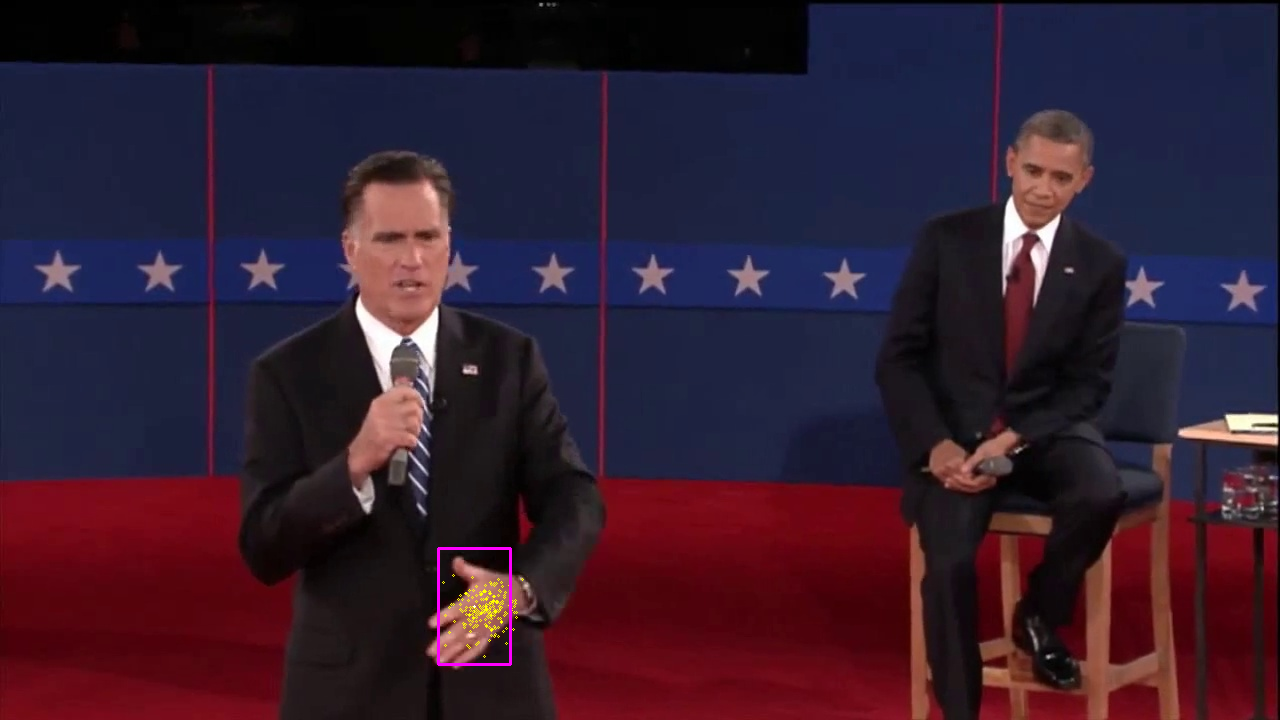
The program used the Particle filter to track the man's hand. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.
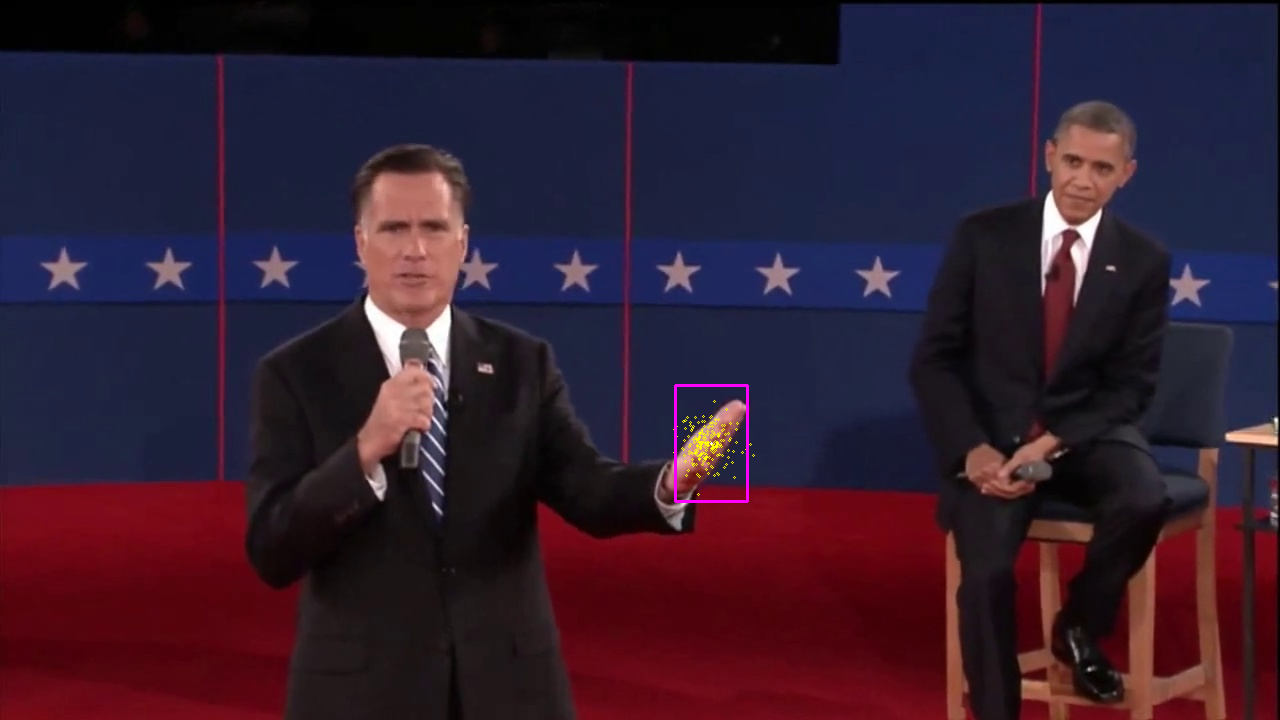
The program used the Particle filter to track the man's hand. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the man's hand. Then it drew a pink bounding box around it, marked the particle locations with yellow dots and the mean particle location with a white ring.

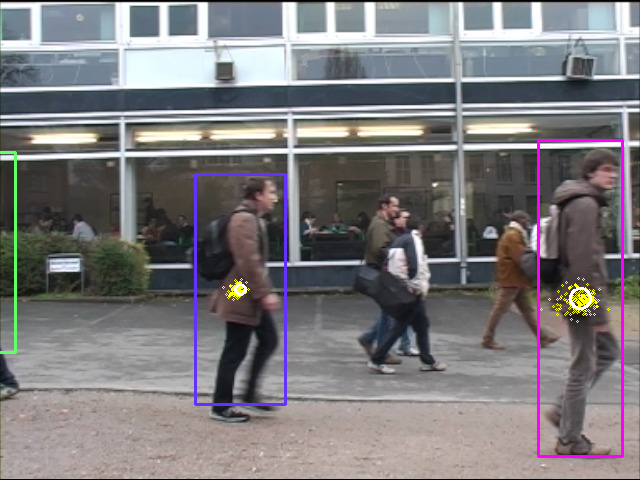
The program used the Particle filter to track the pedestrian in the white coat. Then it drew a pink bounding box around her, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the pedestrian in the white coat. Then it drew a pink bounding box around her, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the pedestrian in the white coat. Then it drew a pink bounding box around her, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the pedestrian in the white coat. Then it drew a pink bounding box around her, marked the particle locations with yellow dots and the mean particle location with a white ring.
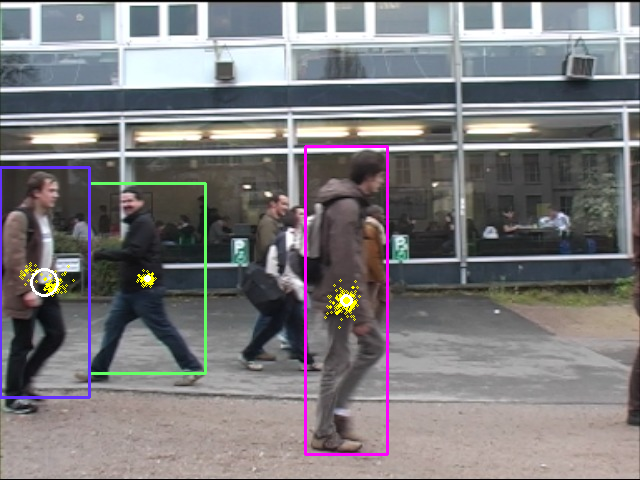
The program used Particle filters to track the 3 pedestrians. Then it drew bounding boxes around them, marked the particle locations with yellow dots and the mean particle locations with a white ring.
The program used Particle filters to track the 3 pedestrians. Then it drew bounding boxes around them, marked the particle locations with yellow dots and the mean particle locations with a white ring.
The program used Particle filters to track the 3 pedestrians. Then it drew bounding boxes around them, marked the particle locations with yellow dots and the mean particle locations with a white ring.

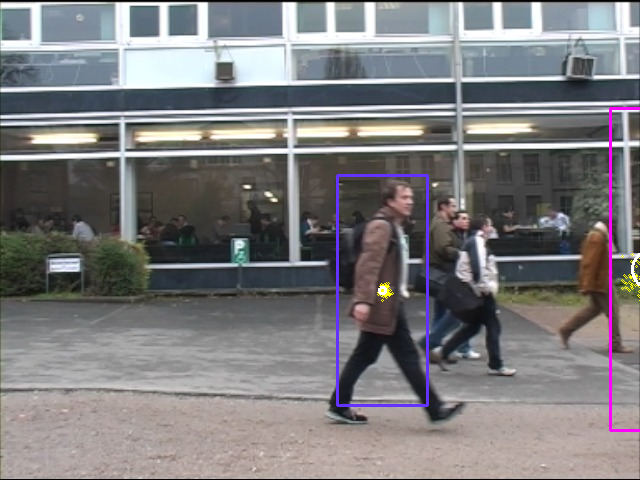
The program used the Particle filter to track the pedestrian with the white bag, even when he was occluded behind another object. Then it drew a pink bounding box around him, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the pedestrian with the white bag, even when he was occluded behind another object. Then it drew a pink bounding box around him, marked the particle locations with yellow dots and the mean particle location with a white ring.

The program used the Particle filter to track the pedestrian with the white bag, even when he was occluded behind another object. Then it drew a pink bounding box around him, marked the particle locations with yellow dots and the mean particle location with a white ring.